Pozdrav svima, prije tri mjeseca - dok sam sjedio “na odgovorima na mail ru” naišao sam na pitanje: http://otvet.mail.ru/question/92397727, nakon odgovora koji sam dao, autor pitanja je počeo pišite mi u ličnu poruku, iz prepiske se saznalo da je druže „Ivan Ružitski“, takođe poznat kao „STAWR“, pravi automobil na daljinsko upravljanje kad god je to moguće bez „skupog“ fabričkog hardvera.
Od onoga što je kupio, imao je RF module na 433 MHz i "kantu" radio komponenti.
Nisam baš bio „bolestan“ od ove ideje, ali sam ipak počeo da razmišljam o mogućnosti realizacije ovog projekta sa tehničke strane.
U to vrijeme sam već bio prilično upućen u teoriju radio kontrole (mislim da jeste), osim toga; neki razvoji su već bili u upotrebi.
Pa za zainteresovane - Uprava je smislila dugme......
dakle:
Svi čvorovi su napravljeni "na koljenu", tako da nema "ljepote", glavni zadatak je saznati koliko je ovaj projekt izvodljiv i koliko će "izaći" u rubljama i trudu.
DALJINSKI UPRAVLJAC:
Nisam napravio domaći predajnik iz dva razloga:
1. Ivan ga već ima.
2. Jednom sam pokušao podići 27 MHz - ništa dobro nije bilo od toga.
Budući da je upravljanje dizajnirano da bude proporcionalno, sve vrste daljinskih upravljača iz kineskog smeća nestale su same od sebe.
Uzeo sam kolo enkodera (koder kanala) sa ove stranice: http://ivan.bmstu.ru/avia_site/r_main/HWR/TX/CODERS/3/index.html
Hvala puno autorima, upravo zbog ovog uređaja sam morao da naučim kako da „flešujem” MK.
Odašiljač i prijemnik sam kupio baš tamo u Parku, iako na 315 MHz, samo sam izabrao jeftiniji:
Web stranica s enkoderom ima sve što vam treba - sam krug, tiskanu ploču "za peglanje" i čitavu gomilu firmvera s raznim troškovima.
Telo daljinskog upravljača je zalemljeno od fiberglasa, štapovi su uzeti sa helikopterskog daljinskog upravljača sa IC kontrolom, moglo je i sa kompjuterskog gamepada, ali žena bi me ubila, pušta "DmC" na njemu, baterija pretinac je sa istog daljinskog upravljača.
Postoji prijemnik, ali da bi se auto kretao, potreban vam je i dekoder (dekoder kanala), tako da sam morao dugo da ga tražim - čak se i Gugl znojio, pa, kako kažu, "neka tražilac pronalazi” i evo ga: http://homepages .paradise.net.nz/bhabbott/decoder.html
Postoje i firmware-i za MK.
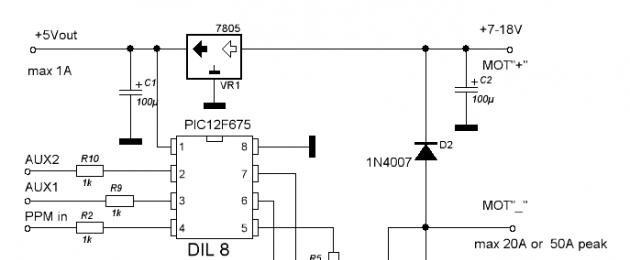
Regulator: U početku sam napravio jednostavniji:

Ali vožnja samo ispred nije led i ovaj je izabran: 
Link do web stranice: http://vrtp.ru/index.php?showtopic=18549&st=600
Firmware je također tu.
Pretražio sam brdo matičnih ploča i video kartica i nisam našao potrebne tranzistore, odnosno za nadlakticu (P-kanal), pa je H-most (ovo je jedinica koja pokreće motor) zalemljen na osnovu Toshiba mikrokolo sa "TA7291P" video rekordera,

maksimalna struja je 1,2A - što mi je sasvim odgovaralo (ne TRAXXAS - ja to radim), iscrtao sam ploču markerom za 20 rubalja, nagrizao je željeznim hloridom, zalemio sa strane staza. Evo šta se desilo.


"Čisti" PRM se emituje u vazduh, to naravno nije dobro, neću ovo da stavljam u avion, ali za igračku će sasvim dobro.
Auto je uzet iz fabrike, od brace Kineza, skinuta je cijela tribina osim upaljenog motora i na njeno mjesto su stavili moj i Ivanov projekat, iako se bavimo njime posebno, to je bila njegova ideja!
Potrošeno:
Set RF modula – 200 RUR
Dva PIC12F675 MK - po 40 rubalja.
Serva - TG9e 75r
+3 popodne.
Ako imate pitanja, rado ću odgovoriti (nisam pisao o mnogo stvari)
Srdačan pozdrav, Vasily.
Ovaj radio-upravljački sistem je dizajniran za izvršavanje jedne komande, ali se u isto vrijeme može proširiti na četiri ili pet komandi. Njegove prednosti uključuju minimalne dimenzije ploče prijemnika i minimiziranje broja njegovih visokofrekventnih zavojnica. Sistem se može koristiti u bilo kojem startnom uređaju, u sigurnosnom alarmnom sistemu, ličnom pozivu ili daljinskom upravljanju modela i uređaja.
U svim ovim slučajevima, kada je potrebno daljinsko upravljanje sa udaljenosti do 500-500m u gradu, i do 5000m na otvorenom prostoru ili iznad vode.
specifikacije:
1. Radna frekvencija kanala............. 27,12 MHz.
2. Snaga predajnika 600 mW.
3. Napon napajanja predajnika......... 9 V.
4. Potrošnja struje od strane predajnika............. 0,3 A.
5. Osetljivost prijemnika......................... 2 µV.
6. Selektivnost pri depodešavanju od 10 kHz......... 36 dB.
7. Napon napajanja prijemnika 3.3-5V.
8. Potrošnja struje prijemnika u mirovanju............. 12 mA.
9. Potrošnja struje prijemnika kada se aktivira je 60 mA i zavisi od tipa releja koji se koristi.
Šematski dijagram i instalacija prijemnog puta prikazani su na slici 1. Radiofrekventni signal iz antene preko prijelaznog kondenzatora C1 ulazi u ulazno kolo L1 C2 podešeno na frekvenciju od 27,12 MHz. Iz izlaza ovog kola signal ide u visokofrekventni pojačivač baziran na tranzistoru sa efektom polja VT1. Dioda VD1 služi za ograničavanje izvornog signala kada udaljenost između antene prijemnika i predajnika nije velika.
Ovaj tranzistor usklađuje asimetrični izlaz visokog otpora kola sa simetričnim ulazom niske otpornosti mikrokola DA1, koji služi kao frekventni pretvarač. Frekvencija lokalnog oscilatora određena je rezonantnom frekvencijom rezonatora Q1. U ovom slučaju, frekvencija lokalnog oscilatora je 26,655 MHz. Signal srednje frekvencije od 465 kHz dodjeljuje se otporniku opterećenja pretvarača R3.
Iz ovog otpornika IF signal kroz piezokeramički filter Q2 (određuje svu selektivnost) ide do DA2 čipa, koji sadrži pojačalo srednje frekvencije, detektor amplitude, AGC sistem i niskofrekventno pojačalo. Sa izlaza detektora mikrosklopa (pojačanje 8), napon niske frekvencije s amplitudom od 50-100 mV dovodi se kroz rezni otpornik R8 na ulaz ultrazvučne sonde, koji ovaj signal pojačava na 1,5 - 2 V.
Pojačani niskofrekventni signal sa pina 12 mikrokola ide kroz C1B do kaskade na tranzistoru VT2. Ovo je kaskada refleksnih ključeva. Pojačava naizmjenični napon, koji se iz svog kolektora dovodi u oscilatorni krug L2 C19, podešen na 1250 Hz.
Ako ulazni napon ima ovu frekvenciju, kolo ulazi u rezonanciju i na katodi diode VD2 se pojavljuje konstantan napon, što dovodi do otvaranja tranzistora. Struja kolektora mu se povećava i čim dostigne radnu vrijednost releja XS, on se aktivira i svojim kontaktima zatvara ili otvara strujno kolo uređaja kojim se upravlja.
Strukturno, prijemnik je sastavljen na tiskanu ploču male veličine, čiji je dijagram prikazan u punoj veličini. Moraju se koristiti mali dijelovi. Zavojnica L1 je namotana na cilindričnu feritnu šipku prečnika 2,8 mm i dužine 12 mm. Sadrži 14 zavoja žice PEV-0,31. Namotaju ga tako da se jezgro može u njemu kretati uz određeno trenje. Piezokeramički filter je takođe male veličine - FGLP061-02 na 465 kHz. Možete koristiti drugi filter na ovoj frekvenciji, važno je da dimenzije to dozvoljavaju.
Relej - RES55 - reed prekidač, pasoš RS4.569.603. Ovaj relej omogućava prebacivanje struje do 0,25A. Možete koristiti drugi relej male veličine, na primjer RES43 ili RES44. Zavojnica niskofrekventnog kola L2 namotana je na feritni prsten K7-4-2 od 400NN ferita i sadrži 350 zavoja žice PEV-0,06.
Podešavanje RF dijela prijemnika svodi se na podešavanje ulaznog kola na frekvenciju kanala. Postavljanje kaskade na VT2 svodi se na postavljanje režima tako da kada je modulator odašiljača isključen, kontakti releja budu u beznaponskom položaju. Režim se postavlja odabirom R9, u nekim slučajevima se može isključiti. R8 je podešen tako da postoji maksimalna osjetljivost, a da u isto vrijeme relej ne radi zbog šuma.

Šematski dijagram predajnika prikazan je na slici 2. Glavni oscilator predajnika je izrađen na VT1 sa kvarcnom stabilizacijom frekvencije. Kvarcni rezonator Q1 je odabran za noseću frekvenciju od 27,12 MHz. Napon ove frekvencije se oslobađa u induktoru L1 i preko kondenzatora C8 se dovodi do pojačivača snage na tranzistoru VT2. Pojačani VF napon se oslobađa na induktoru L3.
Da bi se uskladila sa antenom, na elementima L4, L5, C12, C13, C14 i C15 koristi se dvostruko kolo u obliku "51". Poklapa se sa ulaznom impedancijom antene i izlazom predajnika i filtrira harmonike noseće frekvencije. Zavojnica L6 se koristi za povećanje ekvivalentne dužine antene i samim tim povećanje emitovane energije.
Za modulaciju se koristi ključni stepen na tranzistoru VT3. Kada se negativni napon u odnosu na emiter dovede na njegovu bazu, on se otvara i napaja pojačalo snage.
Pravokutne impulse za upravljanje modulatorom generiše multivibrator na čipu D1. Frekvencija generiranja je određena kondenzatorom C3 i otpornicima R1 i R2. Element D1.3 djeluje kao oblikovnik impulsa, a D1.4 je modulacijski prekidač.
U režimu rada, ako nema komande, napajanje se dovodi do predajnika (S2 je zatvoren). U ovom slučaju, prekidač S1 je zatvoren, a napon blizu nule postavljen je na izlazu elementa D1.4 (u odnosu na napajanje minus). Ovaj napon je negativan u odnosu na emiter VT3. Prolazi kroz R5 do baze ovog tranzistora i otvara ga.
Kao rezultat toga, u nedostatku komande, predajnik emituje nemoduliran signal. Ovo je neophodno kako bi se začepio visokofrekventni put prijemnika i eliminisao uticaj električnih smetnji i atmosferskog šuma na njegov rad. Da biste poslali komandu, potrebno je da otvorite prekidač S1. Tada će se element D1.2 otvoriti i proći kroz sebe pravokutne impulse iz multivibratora.
Predajnik će emitovati modulirani signal, relej prijemnika će raditi. Ako nema opasnosti od smetnji, a udaljenost između prijemnika i predajnika je mala, konstantno zračenje možete eliminisati otvaranjem S1 i slanjem komandi samo zatvaranjem S2. Ovaj način rada treba koristiti kada se radi sa opremom u sigurnosnom kompleksu, jer je nemoguće zauzeti frekvenciju tako dugo.
Predajnik je montiran na štampanu ploču čiji je crtež u punoj veličini prikazan na slici 2. U predajniku nije potrebno raditi minimalne dimenzije ploče i možete koristiti dijelove koji nisu tako mali kao u prijemniku.
K176LA7 čip se može zamijeniti sa K561LA7 ili ako se raspored ploče promijeni u K564LA7. Tranzistor VT1 se može koristiti KT608 sa bilo kojim slovom, VT2 - KT606, KT907. VT3 - KT816 ili GT403.
Zavojnice predajnika L4 i L5 su bez okvira, imaju prečnik od 7 mm i dužinu od 10 mm, L4 sadrži 15 zavoja PEV-0,61, L6 sadrži 20 zavoja PEV-0,56. Zavojnica L6 je napravljena na isti način kao i zavojnica ulaznog kruga prijemnika, ima feritno jezgro. Sadrži 18 zavoja PEV-0.2. Prigušnice L1, L2 i L3 su namotane na trajne otpornike MLT-0,5 sa otporom od najmanje 100 sa žicom PEV-0,16, po 40 zavoja. Kao antena se koristi štap dužine 75 cm.
Postavke
Predajnik se podešava pomoću merača talasa sa indikatorom jačine polja ili visokofrekventnog osciloskopa (C1-65) sa zavojnicom na ulazu. U oba slučaja, prekidač S1 je zatvoren i napon na VT3 kolektoru se mjeri, treba biti blizu napona napajanja.
Zatim, povezanom radnom antenom, kompresijom i širenjem zavoja L4 i L5, podešavanjem C13 i promjenom induktivnosti pomicanjem jezgre L6, postižemo maksimalni neiskrivljeni sinusoidalni signal osnovne frekvencije (greškom možete podesiti harmonik ), snimljen talasomjerom ili osciloskopom sa udaljenosti od oko 1 metar od antene.
Sada možete uključiti modulaciju pomoću prekidača S1. Sada bi modulirani signal trebao biti vidljiv na ekranu osciloskopa; ako smanjite period sweep-a osciloskopa, na njegovom ekranu će se pojaviti čvrsti pravokutnici koji ne bi trebali imati izobličenja ili šiljke. Niskofrekventne postavke prijemnika i predajnika su uparene u predajniku podešavanjem otpornika na maksimalni radni opseg.
Ako trebate napraviti nekoliko naredbi, potrebno je napraviti prekidač koji će prebaciti nekoliko otpornika R2. U prijemniku morate napraviti nekoliko kaskada sličnih kaskadi na VT2, koje će se razlikovati samo po kapacitetu C19, i spojiti ih na tačku "A" (slika 1). Preporučeni kapaciteti C19 za četiri komande su 0,15 µF, 0,1 µF, 0,068 µF i 0,033 µF.
Nakon podešavanja, svi svitovi odašiljača i ulazni kalem prijemnika moraju biti fiksirani epoksidnom smolom.
U ovom članku ćete vidjeti kako vlastitim rukama napraviti radio kontrolu za 10 komandi. Domet ovog uređaja je 200 metara na zemlji i više od 400 metara u vazduhu.
Dijagram je preuzet sa web stranice vrtp.ru
Predajnik

Prijemnik

Tasteri se mogu pritiskati bilo kojim redosledom, iako sve radi stabilno odjednom. Koristeći ga, možete kontrolisati različita opterećenja: garažna vrata, svjetla, makete aviona, auta i tako dalje... Uglavnom, bilo šta, sve ovisi o vašoj mašti.
Za rad nam je potrebna lista delova:
1) PIC16F628A-2 kom (mikrokontroler) (link na aliexpress pic16f628a
)
2) MRF49XA-2 kom (radio predajnik) (link na aliexpress MRF 49 XA
)
3) Induktor 47nH (ili sami namotajte) - 6 kom
kondenzatori:
4) 33 uF (elektrolitski) - 2 kom.
5) 0,1 uF-6 kom
6) 4,7 pF-4 kom
7) 18 pF - 2 kom
Otpornici
8) 100 Ohm - 1 kom
9) 560 Ohm - 10 kom
10) 1 Com-3 komada
11) LED - 1 kom
12) dugmad - 10 kom.
13) Kvarc 10MHz-2 kom
14) Tekstolit
15) Lemilica
Kao što vidite, uređaj se sastoji od minimuma dijelova i može ga napraviti svako. Samo to treba da želiš. Uređaj je vrlo stabilan, nakon sklapanja radi odmah. Kolo se može napraviti kao na štampanoj ploči. Isto je i sa montiranom instalacijom (naročito po prvi put, biće lakše programirati). Prvo pravimo ploču. Odštampajte

I trujemo ploču.
Zalemimo sve komponente, bolje je lemiti PIC16F628A kao posljednju, jer će i dalje biti potrebno programirati. Prije svega, lemite MRF49XA

Glavna stvar je biti vrlo oprezan, ona ima vrlo suptilne zaključke. Kondenzatori za jasnoću. Najvažnije je da ne pobrkate polove na kondenzatoru od 33 uF jer su njegovi terminali različiti, jedan je +, drugi -. Svi ostali kondenzatori se mogu zalemiti po želji, nemaju polaritet na stezaljkama


Možete koristiti kupljene 47nH zavojnice, ali je bolje da ih sami namotate, svi su isti (6 zavoja 0,4 žice na trnu od 2 mm)
Kada je sve zalemljeno, sve dobro proveravamo. Zatim uzimamo PIC16F628A, treba ga programirati. Koristio sam PIC KIT 2 lite i domaću utičnicu
Evo linka do programera ( Pic Kit2 )


Evo dijagrama povezivanja

Sve je jednostavno, pa nemojte se plašiti. Za one koji su daleko od elektronike, savjetujem da ne počinju sa SMD komponentama, već da kupe sve u DIP veličini. I sama sam ovo uradila prvi put


I sve je zaista uspjelo prvi put

Otvorite program, odaberite naš mikrokontroler
Nakon što sam pročitao ovaj post, inspirisao me i ideja da zakivam vlastiti avion. Uzeo sam gotove crteže i naručio motore, baterije i propelere od Kineza. Ali odlučio sam da radim upravljam sam, prvo - zanimljivije je, drugo - moram se nečim zaokupiti dok je paket sa ostatkom rezervnih dijelova na putu, i treće - postoji mogućnost da budem originalan i dodati sve vrste dobrota.
Čuvajte se slika!
Kako i čime upravljati
Normalni ljudi uzimaju prijemnik, priključuju servo i regulator brzine, pomjeraju poluge na daljinskom upravljaču i uživaju u životu ne pitajući se o principima rada ili upuštajući se u detalje. U našem slučaju to neće raditi. Prvi zadatak je bio otkriti kako se servo upravlja. Ispada da je sve prilično jednostavno, pogon ima tri žice: + napajanje, - napajanje i signal. Na signalnoj žici se nalaze pravougaoni impulsi promenljivog radnog ciklusa. Da biste shvatili o čemu se radi, pogledajte sliku:
Dakle, ako želimo da pogon postavimo u krajnji levi položaj, potrebno je da šaljemo impulse u trajanju od 0,9 ms sa intervalom od 20 ms, ako u krajnji desni - u trajanju od 2,1 ms, interval je isti , pa sa srednjim pozicijama je isto. Kako se ispostavilo, regulatori brzine se kontroliraju na sličan način. Oni koji su u ovoj temi reći će da je ovo običan PWM, koji se može implementirati na bilo koji mikrokontroler - sitnica. Tako sam odlučio, kupio servo mašinu u lokalnoj trgovini i zakivao takozvani ATtiny13 servo tester za nju na matičnoj ploči. A onda se pokazalo da PWM nije sasvim jednostavan, ali ima zamke. Kao što se vidi iz gornjeg dijagrama, radni ciklus (odnos trajanja impulsa i trajanja perioda) je od 5% do 10% (u daljem tekstu uzimam impulse trajanja od 1,0 ms i 2,0 ms kao ekstremne pozicije ) za 256-cifreni PWM brojač ATtiny13, ovo odgovara vrijednostima od 25 do 50. Ali to je pod uvjetom da će biti potrebno 20 ms da se brojač napuni, ali u stvarnosti to neće raditi, a za frekvenciju od 9,6 MHz i predskaler od 1024, trebamo ograničiti brojač na vrijednost 187 (TOR), u kom slučaju ćemo dobiti frekvenciju od 50,134 Hz. Većina (ako ne i svi) servo uređaji nemaju precizan generator referentne frekvencije i stoga frekvencija kontrolnog signala može blago fluktuirati. Ako ostavite VRH brojača na 255, tada će frekvencija kontrolnog signala biti 36,76 Hz - radit će na nekim pogonima (moguće s greškama), ali ne na svim. Dakle, sada imamo brojač od 187 cifara, za koji 5-10% odgovara vrijednostima od 10 do 20 - ukupno 10 vrijednosti, bit će malo diskretno. Ako razmišljate da se igrate sa frekvencijom takta i predskalerom, ispod je tabela za upoređivanje za 8-bitni PWM:

Ali većina mikrokontrolera ima 16-bitni (ili više) tajmer za generisanje PWM-a. Ovdje će problem s diskretnošću odmah nestati i frekvencija se može precizno podesiti. Neću to dugo opisivati, odmah ću vam dati znak: 
Ne mislim da za kineski servo nema značajne razlike između 600 i 1200 vrijednosti, tako da se pitanje s preciznošću pozicioniranja može smatrati zatvorenim.
Višekanalna kontrola
Sredili smo jedan servo, ali za avion su vam potrebna najmanje tri, kao i regulator brzine. Jednostavno rješenje je uzeti mikrokontroler sa četiri 16-bitna PWM kanala, ali će takav kontroler biti skup i najvjerovatnije će zauzimati dosta prostora na ploči. Druga opcija je korištenje softverskog PWM-a, ali zauzimanje CPU vremena također nije opcija. Ako ponovo pogledate dijagrame signala, 80% vremena ne nosi nikakvu informaciju, pa bi bilo racionalnije postaviti samo sam impuls na 1-2ms koristeći PWM. Zašto radni ciklus varira u tako uskim granicama, budući da bi bilo lakše generirati i očitati impulse s radnim ciklusom od najmanje 10-90%? Zašto nam je potreban taj neinformativni dio signala koji zauzima 80% vremena? Sumnjao sam da bi možda ovih 80% mogli zauzeti impulsi za druge aktuatore, a onda se ovaj signal dijeli na nekoliko različitih. Odnosno, u periodu od 20 ms može stati 10 impulsa u trajanju od 1-2 ms, a onda ovaj signal neki demultiplekser dijeli na 10 različitih s trajanjem perioda od samo 20 ms. Čim je rečeno nego urađeno, nacrtao sam sljedeći dijagram u PROTEUS-u:
74HC238 djeluje kao demultiplekser; impulsi sa izlaza mikrokontrolera se dovode na njegov ulaz E. Ovi impulsi su PWM sa periodom od 2ms (500Hz) i radnim ciklusom od 50-100%. Svaki impuls ima svoj ciklus rada, koji pokazuje stanje svakog kanala. Ovako izgleda signal na ulazu E:

Da bi 74HC238 znao na koji izlaz poslati strujni signal, koristimo PORTC mikrokontrolera i ulaze A, B, C demultipleksera. Kao rezultat, na izlazima dobivamo sljedeće signale:

Izlazni signali se dobijaju na ispravnoj frekvenciji (50Hz) i radnom ciklusu (5-10%). Dakle, potrebno je da generišete PWM sa frekvencijom od 500Hz i punjenjem od 50-100%, evo tabele za podešavanje predskalera i TOP 16-bitnog brojača:

Zanimljivo je da je mogući broj PWM vrijednosti tačno 1000 puta manji od frekvencije tajmera.
Implementacija softvera
Za ATmega8 sa frekvencijom takta od 16 MHz u AtmelStudio6, sve je implementirano na sljedeći način: prvo definiramo vrijednosti brojača za ekstremne položaje servosa:#define LOW 16000U #define HIGH 32000U
tada inicijaliziramo PWM generator na timer/counter1:
OCR1A = VISOKO; //Postavi TOP TCCR1A = 0<
ISR(TIMER1_COMPA_vect) //prekida se kada se dostigne gornja vrijednost brojača, neposredno prije početka sljedećeg impulsa ( //c_num je varijabla koja označava broj trenutnog kanala, kanali je niz vrijednosti kanala ako (c_br<= 7) { OCR1B = channels; } else { OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала } } ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса { if (c_num <= 7) { PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC } //и изменяем значение счетчика от 0 до 9 if (c_num >= 9) ( c_num = 0; ) ostalo ( c_num++; ) )
Globalno omogućite prekide i gotovi ste, unoseći vrijednosti od LOW do HIGH u kanale i mijenjajući vrijednosti na kanalima.
Implementacija u hardveru
Pa, sredili smo teoriju, vrijeme je da sve to implementiramo. Mikrokontroler ATmega8A je izabran kao mozak sistema, koji je klokovao kvarc na 16 MHz (ne zato što sam želeo 16.000 servo pozicija, već zato što sam imao neke od njih). Kontrolni signal za MK će biti primljen preko UART-a. Rezultat je sljedeći dijagram:
Nakon nekog vremena pojavio se ovaj šal:


Dva tropina konektora nisam lemio jer mi ne trebaju, a nisu zalemljeni u nizu jer nemam metalizirane rupe, a u donjem konektoru bi se šinice sa obje strane mogle zamijeniti žica, ali u softveru nema problema sa izlazom signala na bilo koji konektor. Također nedostaje 78L05 jer moj regulator motora ima ugrađeni stabilizator (WE).
Za primanje podataka, radio modul HM-R868 je povezan na ploču:

U početku sam mislio da ga priključim direktno na ploču, ali ovaj dizajn nije stao u avion, morao sam to da uradim preko kabla. Ako promijenite firmver, kontakti konektora za programiranje mogu se koristiti za uključivanje/isključivanje nekih sistema (bočna svjetla, itd.)
Ploča košta oko 20 UAH = 2,50 USD, prijemnik - 30 UAH = 3,75 USD.
Predajni dio
Avionski dio je tu, ostalo je da se pozabavimo zemaljskom opremom. Kao što je već napisano, podaci se prenose preko UART-a, jedan bajt po kanalu. Prvo sam povezao svoj sistem žicom preko adaptera sa računarom i slao komande preko terminala. Da bi dekoder odredio početak parcele i ubuduće odabrao parcele adresirane na njega, prvo se šalje identifikator, a zatim 8 bajtova koji definišu stanje kanala. Kasnije sam počeo da koristim radio module; kada je predajnik isključen, svi motori su počeli divlje da se trzaju. Da bih filtrirao signal od šuma, sa desetim bajtom šaljem XOR svih 9 prethodnih bajtova. Pomoglo je, ali slabo, dodao sam i provjeru vremenskog ograničenja između bajtova; ako se prekorači, cijelo slanje se zanemaruje i prijem počinje ponovo, čekajući bajt identifikatora. Sa dodatkom kontrolne sume u obliku XOR-a, slanje komandi sa terminala postalo je stresno, pa sam ovaj program brzo zakovao klizačima:
Broj u donjem lijevom uglu je kontrolni zbroj. Pomeranjem klizača na računaru, pomerala su se i kormila na avionu! Općenito, sve sam ovo otklonio i počeo razmišljati o daljinskom upravljaču, za to sam kupio ove džojstike:
Ali onda mi je sinula misao. Svojevremeno su me privlačile razne vrste simulatora letenja: “IL-2 Šturmovik”, “Lock On”, “MSFSX”, “Ka-50 Black Shark” itd. odlučio da ga spojim na gornji program pomoću klizača. Guglao sam kako to implementirati, pronašao ovaj post i uspjelo je! Čini mi se da je upravljanje avionom pomoću punog džojstika mnogo bolje nego korištenjem malog štapića na daljinskom upravljaču. Općenito, sve je prikazano zajedno na prvoj fotografiji - ovo je netbook, džojstik, FT232 pretvarač i HM-T868 predajnik koji je povezan s njim. Konverter je povezan kablom od 2m od štampača, što vam omogućava da ga montirate na neko drvo ili nešto slično.
Počni!
Dakle, postoji avion, postoji radio kontrola - Idemo!(c) Prvi let je obavljen preko asfalta, rezultat je bio razbijen trup na pola i napola istrgnut motor. Drugi let je obavljen preko mekše površine:Narednih 10 letova također nije bilo posebno uspješnih. Mislim da je glavni razlog ekstremna diskretnost džojstika - za roll je dao samo 16 vrijednosti (umjesto mogućih 256), sa osovinom nagiba nije bilo ništa bolje. Ali pošto je kao rezultat testova avion značajno oštećen i ne može se popraviti:

- Još nije moguće provjeriti istinitost ove verzije. Ovu verziju podržava i pokušaj nivelisanja aviona snimljenog na video snimku - on leti nagnuto, a zatim naglo pada u suprotnom smeru (ali bi trebalo da bude glatko). Evo još vizuelnijeg videa:
Domet rada opreme je cca 80m, hvata i dalje, ali s vremena na vrijeme.
Pa, to je sve, hvala na pažnji. Nadam se da će pružene informacije nekome biti korisne. Rado ću odgovoriti na sva pitanja.
U arhivi se nalazi dijagram i izgled ploče za Proteus.
Ko od početnika radio-amatera nije želio napraviti neku vrstu uređaja kojim upravlja radio kanal? Sigurno mnogo.
Pogledajmo kako sastaviti jednostavan radio-upravljani relej na osnovu gotovog radio modula.
Koristio sam gotov modul kao primopredajnik. Kupio sam ga na AliExpressu od ovog prodavca.
Komplet se sastoji od daljinskog upravljača za 4 komande (privezak za ključeve), kao i prijemne ploče. Prijemna ploča je napravljena u obliku zasebne štampane ploče i nema izvršna kola. Morate ih sami sastaviti.
Evo izgleda.

Privjesak za ključeve je kvalitetan, prijatan na dodir i dolazi sa baterijom od 12V (23A).
Privjesak za ključeve ima ugrađenu ploču na kojoj je sastavljeno prilično primitivno kolo predajnika daljinskog upravljača pomoću tranzistora i SC2262 enkodera (potpuni analog PT2262). Zbunila me činjenica da je oznaka na čipu SC2264, iako je iz datasheeta poznato da je dekoder za PT2262 PT2272. Odmah na tijelu čipa, odmah ispod glavne oznake, označen je SCT2262. Zato razmislite šta je šta. Pa, ovo nije iznenađujuće za Kinu.

Predajnik radi u modusu amplitudne modulacije (AM) na frekvenciji od 315 MHz.
Prijemnik je montiran na maloj štampanoj ploči. Put radio prijema je napravljen od dva SMD tranzistora sa oznakom R25 - bipolarni N-P-N tranzistori 2SC3356. Na operacionom pojačalu LM358 implementiran je komparator, a na njegov izlaz je povezan dekoder SC2272-M4 (aka PT2272-M4).

Kako uređaj radi?
Suština rada ovog uređaja je sljedeća. Kada pritisnete jedno od dugmadi na daljinskom upravljaču A, B, C, D, prenosi se signal. Prijemnik pojačava signal, a napon od 5 volti se pojavljuje na izlazima D0, D1, D2, D3 ploče prijemnika. Čitava kvaka je u tome da će 5 volti izlaziti samo sve dok je pritisnuto odgovarajuće dugme na privjesku. Kada otpustite dugme na daljinskom upravljaču, napon na izlazu prijemnika će nestati. Ups. U tom slučaju neće biti moguće napraviti radio-upravljani relej koji bi radio kada se kratko pritisne dugme na privjesku i isključio se ponovnim pritiskom.
To je zbog činjenice da postoje različite modifikacije PT2272 čipa (kineski analog je SC2272). I iz nekog razloga ugrađuju PT2272-M4 u takve module, koji nemaju fiksaciju napona na izlazu.
Koje vrste PT2272 mikrokola postoje?
PT2272-M4- 4 kanala bez fiksacije. Na izlazu odgovarajućeg kanala, +5V se pojavljuje samo dok je pritisnuto dugme na ključu. Upravo ovo je mikrokolo koje se koristi u modulu koji sam kupio.
PT2272-L4- 4 zavisna kanala sa fiksacijom. Ako je jedan izlaz uključen, ostali su isključeni. Nije baš zgodno ako trebate samostalno kontrolirati različite releje.
PT2272-T4- 4 nezavisna kanala sa fiksacijom. Najbolja opcija za upravljanje više releja. Pošto su nezavisni, svaki može obavljati svoju funkciju nezavisno od rada drugih.
Šta možemo učiniti da relej radi onako kako nam je potrebno?
Ovdje postoji nekoliko rješenja:
Mi istrgamo mikro krug SC2272-M4 i zamjenjujemo ga istim, ali s indeksom T4 (SC2272-T4). Sada će izlazi raditi nezavisno i zaključano. Odnosno, biće moguće uključiti/isključiti bilo koji od 4 releja. Relej će se uključiti kada se pritisne neko dugme, a isključiće se kada se odgovarajuće dugme ponovo pritisne.
Dopunjavamo krug okidačem na K561TM2. Budući da se mikro krug K561TM2 sastoji od dva okidača, trebat će vam 2 mikrokola. Tada će biti moguće kontrolisati četiri releja.
Koristimo mikrokontroler. Zahtijeva vještine programiranja.
Nisam našao čip PT2272-T4 na tržištu radija i smatrao sam neprikladnim naručiti cijelu seriju identičnih mikro krugova od Alija. Stoga sam za sastavljanje radio-upravljanog releja odlučio koristiti drugu opciju s okidačem na K561TM2.
Shema je prilično jednostavna (na sliku se može kliknuti).

Evo implementacije na matičnoj ploči.


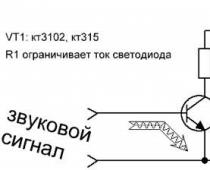
Na matičnoj ploči brzo sam sastavio izvršno kolo za samo jedan kontrolni kanal. Ako pogledate dijagram, možete vidjeti da su isti. Kao opterećenje, priključio sam crvenu LED diodu kroz otpornik od 1 kOhm na kontakte releja.
Vjerovatno ste primijetili da sam gotov blok sa relejem utaknuo u matičnu ploču. Izvukao sam ga iz sigurnosnog alarma. Blok se pokazao vrlo zgodnim, jer su sam relej, pin konektor i zaštitna dioda već bili zalemljeni na ploči (ovo je VD1-VD4 na dijagramu).
Objašnjenja za dijagram.
Prijemni modul.

VT pin je pin na kojem se pojavljuje napon od 5 volti ako je signal primljen od predajnika. Na njega sam spojio LED kroz otpor od 300 Ohma. Vrijednost otpornika može biti od 270 do 560 Ohma. Ovo je naznačeno u tablici podataka za čip.
Kada pritisnete bilo koje dugme na privjesku za ključeve, LED dioda koju smo spojili na VT pin prijemnika će kratko treptati - to znači da je signal primljen.
Stezaljke D0, D1, D2, D3; - ovo su izlazi dekoderskog čipa PT2272-M4. Od njih ćemo uzeti primljeni signal. Napon od +5V pojavljuje se na ovim izlazima ako je primljen signal sa kontrolne table (privezak). Na ove pinove su povezana izvršna kola. Dugmad A, B, C, D na daljinskom upravljaču (privezak) odgovaraju izlazima D0, D1, D2, D3.
Na dijagramu, prijemni modul i okidači se napajaju naponom od +5V iz integriranog stabilizatora 78L05. Pinout stabilizatora 78L05 prikazan je na slici.

Bufer kolo na D flip-flopu.
Na čipu K561TM2 montiran je djelitelj frekvencije za dva. Impulsi iz prijemnika stižu na ulaz C, a D-flip-flop prelazi u drugo stanje sve dok drugi impuls iz prijemnika ne stigne na ulaz C. Ispada vrlo zgodno. Budući da se relej kontrolira sa izlaza okidača, bit će uključen ili isključen dok ne stigne sljedeći impuls.
Umjesto mikrokola K561TM2, možete koristiti K176TM2, K564TM2, 1KTM2 (od metala sa pozlaćenim) ili uvezene analoge CD4013, HEF4013, HCF4013. Svaki od ovih čipova se sastoji od dva D japanka. Njihov pinout je isti, ali kućišta mogu biti različita, kao, na primjer, u 1KTM2.
Izvršno kolo.
Bipolarni tranzistor VT1 se koristi kao prekidač za napajanje. Koristio sam KT817, ali će i KT815. On upravlja elektromagnetnim relejem K1 na 12V. Bilo koje opterećenje može se spojiti na kontakte elektromagnetnog releja K1.1. To može biti žarulja sa žarnom niti, LED traka, električni motor, elektromagnet za bravu itd.
Pinout tranzistora KT817, KT815.

Treba uzeti u obzir da snaga opterećenja spojenog na kontakte releja ne smije biti manja od snage za koju su projektirani kontakti samog releja.
Diode VD1-VD4 služe za zaštitu tranzistora VT1-VT4 od napona samoindukcije. U trenutku kada se relej isključi, u njegovom namotu se javlja napon, koji je suprotan u znaku od onog koji je doveden na namotaj releja iz tranzistora. Kao rezultat toga, tranzistor može pokvariti. A diode se ispostavljaju otvorene u odnosu na napon samoindukcije i "gase" ga. Tako štite naše tranzistore. Ne zaboravite na njih!
Ako želite dopuniti izvršni krug indikatorom aktiviranja releja, dodajte LED i otpornik od 1 kOhm u krug. Evo dijagrama.

Sada, kada se napon stavi na zavojnicu releja, HL1 LED će se uključiti. Ovo će pokazati da je relej uključen.
Umjesto pojedinačnih tranzistora u krugu, možete koristiti samo jedno mikrokolo s minimalnim ožičenjem. Odgovarajuće mikrokolo ULN2003A. Domaći analog K1109KT22.
Ovaj čip sadrži 7 Darlington tranzistora. Pogodno, pinovi ulaza i izlaza nalaze se jedan naspram drugog, što olakšava raspored ploče, kao i uobičajeno prototipiranje na matičnoj ploči bez lemljenja.
Radi prilično jednostavno. Na ulaz IN1 primjenjujemo napon od +5V, kompozitni tranzistor se otvara, a OUT1 izlaz je spojen na negativno napajanje. Tako se napon napajanja dovodi do opterećenja. Opterećenje može biti elektromagnetski relej, elektromotor, kolo LED dioda, elektromagnet itd.
U tablici sa podacima, proizvođač ULN2003A čipa se hvali da struja opterećenja svakog izlaza može doseći 500 mA (0,5A), što zapravo nije malo. Ovdje će mnogi od nas pomnožiti 0,5 A sa 7 izlaza i dobiti ukupnu struju od 3,5 ampera. Da, odlično! ALI. Ako mikrokolo može pumpati tako značajnu struju kroz sebe, tada će na njemu biti moguće pržiti ćevap...
U stvari, ako koristite sve izlaze i napajate struju u opterećenju, tada možete istisnuti oko ~80 - 100 mA po kanalu bez štete po mikrokolo. Ops. Da, nema čuda.
Evo dijagrama za povezivanje ULN2003A na izlaze okidača K561TM2.

Postoji još jedan široko korišćen čip koji se može koristiti - ovo je ULN2803A.

Već ima 8 ulaza/izlaza. Istrgnuo sam ga sa ploče mrtvog industrijskog kontrolera i odlučio eksperimentirati.
ULN2803A dijagram ožičenja. Da biste naznačili da je relej uključen, krug možete dopuniti krugom LED HL1 i otpornikom R1.

Ovako to izgleda na matičnoj ploči.

Usput, mikro krugovi ULN2003, ULN2803 omogućavaju kombinovanje izlaza za povećanje maksimalne dozvoljene izlazne struje. Ovo može biti potrebno ako opterećenje troši više od 500 mA. Odgovarajući ulazi su takođe kombinovani.
Umjesto elektromagnetnog releja, u kolu se može koristiti solid state relej (SSR). S olid S tate R elay). U ovom slučaju, shema se može značajno pojednostaviti. Na primjer, ako koristite solid-state relej CPC1035N, onda nema potrebe za napajanjem uređaja od 12 volti. Napajanje od 5 volti će biti dovoljno za napajanje cijelog kruga. Također nema potrebe za integriranim stabilizatorom napona DA1 (78L05) i kondenzatorima C3, C4.
Ovako je poluprovodnički relej CPC1035N povezan sa okidačem na K561TM2.

Uprkos svojoj minijaturnoj veličini, poluprovodnički relej CPC1035N može prebaciti naizmjenični napon od 0 do 350 V, sa strujom opterećenja do 100 mA. Ponekad je to dovoljno za pokretanje opterećenja male snage.
Možete koristiti i domaće solid-state releje; na primjer, eksperimentirao sam s K293KP17R.

Otkinuo sam ga sa sigurnosne alarmne table. U ovom releju, pored samog čvrstog releja, postoji i tranzistorski optospojler. Nisam ga koristio - ostavio sam zaključke slobodne. Evo dijagrama povezivanja.

Mogućnosti modela K293KP17R su prilično dobre. Može prebaciti jednosmjerni napon negativnog i pozitivnog polariteta u rasponu od -230...230 V pri struji opterećenja do 100 mA. Ali ne može raditi s naizmjeničnim naponom. To jest, konstantni napon se može napajati na pinove 8 - 9 po želji, bez brige o polaritetu. Ali ne biste trebali dovoditi naizmjenični napon.
Radni opseg.
Da bi prijemni modul mogao pouzdano primati signale od daljinskog upravljača, antena mora biti zalemljena na ANT pin na ploči. Poželjno je da dužina antene bude jednaka četvrtini talasne dužine predajnika (tj. λ/4). Pošto predajnik za ključeve radi na frekvenciji od 315 MHz, prema formuli, dužina antene će biti ~24 cm.Evo proračuna.

Gdje f - frekvencija (u Hz), dakle 315.000.000 Hz (315 megaherca);
Brzina svetlosti WITH - 300.000.000 metara u sekundi (m/s);
λ - talasna dužina u metrima (m).
Da biste saznali na kojoj frekvenciji radi daljinski upravljač, otvorite ga i potražite filter na štampanoj ploči Surfaktant(površinski akustični talasi). Obično označava frekvenciju. U mom slučaju to je 315 MHz.

Ako je potrebno, antenu nije potrebno lemiti, ali će domet uređaja biti smanjen.
Kao antenu možete koristiti teleskopsku antenu nekog neispravnog radija ili radija. Bit će jako cool.
Raspon u kojem prijemnik stabilno prima signal s privjeska za ključeve je mali. Empirijski sam odredio da je udaljenost 15 - 20 metara. Sa preprekama ova udaljenost se smanjuje, ali uz direktnu vidljivost domet će biti unutar 30 metara. Glupo je očekivati nešto više od tako jednostavnog uređaja; njegovo kolo je vrlo jednostavno.
Šifrovanje ili "vezivanje" daljinskog upravljača za prijemnik.
U početku, privezak za ključeve i prijemni modul su nešifrirani. Ponekad kažu da nisu “vezani”.
Ako kupite i koristite dva seta radio modula, prijemnik će se aktivirati različitim privjescima za ključeve. Isto će se dogoditi i sa prijemnim modulom. Dva prijemna modula će biti aktivirana jednim ključem. Kako bi se to spriječilo, koristi se fiksno kodiranje. Ako bolje pogledate, postoje mjesta na ploči za privjesak i na ploči prijemnika gdje možete lemiti kratkospojnike.

Pinovi od 1 do 8 za par čipova kodera/dekodera ( PT2262/PT2272) se koriste za postavljanje koda. Ako bolje pogledate, na ploči kontrolne ploče pored pinova 1 - 8 mikrokola nalaze se kalajisane trake, a pored njih slova H I L. Slovo H označava visok, odnosno visok nivo.
Ako koristite lemilicu da postavite kratkospojnik sa pina mikrokola na traku označenu H, tada ćemo na taj način napajati mikrokolo visokog napona od 5V.
Slovo L znači Low, odnosno postavljanjem kratkospojnika sa pina mikrokola na traku sa slovom L, postavili smo niski nivo na 0 volti na pin mikrokola.
Neutralni nivo nije naznačen na štampanoj ploči - N. To je kada se čini da pin mikrokola "visi" u zraku i nije povezan ni sa čim.
Dakle, fiksni kod je specificiran sa 3 nivoa (H, L, N). Korištenje 8 pinova za postavljanje koda rezultira 3 8 = 6561 moguće kombinacije! Ako uzmemo u obzir da su četiri tipke na daljinskom upravljaču također uključene u generiranje koda, onda je mogućih kombinacija još više. Kao rezultat toga, slučajni rad prijemnika od strane tuđeg daljinskog upravljača s drugačijim kodiranjem postaje malo vjerojatan.
Na prijemnoj ploči nema oznaka u obliku slova L i H, ali ovdje nema ništa komplicirano, jer je L traka spojena na negativnu žicu na ploči. U pravilu, negativna ili obična (GND) žica je napravljena u obliku opsežnog poligona i zauzima veliku površinu na štampanoj ploči.
Traka H je spojena na kola napona od 5 volti. Mislim da je jasno.
Jampere sam postavio na sledeći način. Sada moj prijemnik sa drugog daljinskog upravljača više neće raditi, prepoznaje samo "svoj" privezak. Naravno, ožičenje mora biti isto i za prijemnik i za predajnik.

Usput, mislim da ste već shvatili da ako trebate kontrolirati nekoliko prijemnika s jednog daljinskog upravljača, onda jednostavno zalemite na njih istu kombinaciju kodiranja kao na daljinskom upravljaču.
Vrijedi napomenuti da fiksni kod nije teško provaliti, tako da ne preporučujem korištenje ovih primopredajnih modula u pristupnim uređajima.
- U kontaktu sa 0
- Google+ 0
- uredu 0
- Facebook 0